



厦门理工研究生科技活动月成果展示——基于多传感融合的自主导航机器人研究
基于多传感融合的自主导航机器人研究
一. 成果完成人及所在单位: 郑伟,电气工程与自动化学院 指导教师:徐敏
二. 成果简介:
以机器人的研究在经历了一个长期漫长的发展和积累过程后,随着人工智能、微电子和计算 机等技术的快速发展,机器人的功能已经从单一、简单的工业用途向着功能多样化和智能化的方向 走出了坚实的步伐。其中,智能移动移动机器人将机器人和人工智能紧密结合,更是受到世界上众 多学者广泛的关注和研究,其研究过程涉及人工智能、传感器技术、电子技术、控制科学、机械科 学等众多热门领域,因此在工业、军事、航天和医疗等众多领域有着广泛的应用前景,针对移动机 器人的视觉定位问题进行的深入的研究,提出了复杂工况的自主导航机器人的研究,其釆用多传感 器 代替普通彩色摄像头釆集环境信息,并采用当今流行的的硬件处理器架构保证系统的实时性要求。
三. 主要研究内容及创新点:
(1)基于多传感器利用 slam 对周围地图的采集
基于多传感器对周围环境进行探测,并创建地图。当一个传感器在某一个地段无法使用时,则另一个传感器进行采集,利用多传感器机制进行数据的采集,将复杂工况模拟出来。
(2)对已知的指令做出更高精度
本次设计它不同往常的单传感器搜集数据,它利用多传感器进行数据的采集,并将精度提高。真正达到你向让机器人往哪走就往哪走,并且机器人还会随时探索周围环境,做出最恰当轨迹运行, 将智能机器在工业中上升到具有一定的决策意识的层面。
(3)改进的 A*算法和多传感融合策略
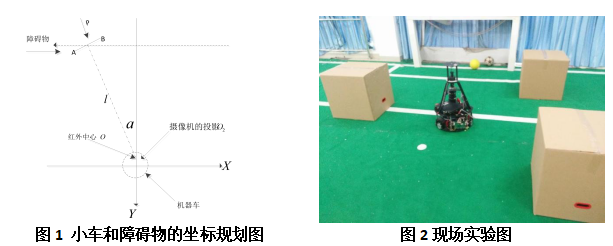
本项目以配有四个麦克纳姆轮的小车为载体,通过激光红外采集数据,依据所传回的数据在 ROS 系统上计算后进行建模,其关键点在于滤波算法的选择,在这里我们可以使用卡尔曼滤波算法,通过(x,y)二维坐标去标示地图上的每一个点。在机械臂上同时装有双目摄像头,通过 Canny 边缘检测算法和小波算法对目标物体的角点进行检测和定位,根据立体视差原理计算获取角点和中心点的三维坐标,对工作点进行位置的修正。
四. 主要研究成果及应用情况
在装备制造技术杂志发表论文 1 篇。
申请实用新型专利 1 项。(在审)
联系人:郑伟 电 话:15280214002 Email:1466979079@qq.com

免责声明:
① 凡本站注明“稿件来源:中国教育在线”的所有文字、图片和音视频稿件,版权均属本网所有,任何媒体、网站或个人未经本网协议授权不得转载、链接、转贴或以其他方式复制发表。已经本站协议授权的媒体、网站,在下载使用时必须注明“稿件来源:中国教育在线”,违者本站将依法追究责任。
② 本站注明稿件来源为其他媒体的文/图等稿件均为转载稿,本站转载出于非商业性的教育和科研之目的,并不意味着赞同其观点或证实其内容的真实性。如转载稿涉及版权等问题,请作者在两周内速来电或来函联系。









![京网文[2017]10376-1180号](http://img.eol.cn/images/indexnew/www1024.jpg){kind=link}